Our radar systems
Being an instrumentation group which focusses on millimetre wave hardware development, there’s nothing we enjoy more than building radars! Over the past couple of decades we have built about 20 radars at frequencies of 10, 24, 38, 77, 94, 220 and 340 GHz for various research projects and applications. Here are some details of these radars, many of which are still in regular use.
Pathfinder Mk2 is a G-band Doppler radar operating at 207 GHz for target and clutter phenomenology studies. It has 2° beamwidth Gaussian optics lens antennas (GOLAs) on transmit and receive.
FAROS-K is our second generation drone detection radar which operates at 24 GHz. This FMCW-Doppler radar has dual elevation fan beam antennas and rotates continuously to provide 360° azimuth coverage. Real-time processing and classification enables discrimination of drones from other targets.
FAROS-E was our first generation drone detection radar and operated at 77 GHz. The turntable was re-used to make FAROS-K but the low phase noise FMCW Doppler radar head may be reused in the future.

Blunderbuss (or ‘BB24’) is a 24 GHz instrumentation radar based around Analog Devices 24 GHz radar chipset. It uses separate feedhorns for transmit and co- and cross-polar receive channels. A ~0.5 W transmit power amplifier and ~3 dB noise figure LNAs on receive make Blunderbuss a quite sensitive radar. The ease of reconfigurability makes it valuable for data collection and phenomenology studies.

T-220 was originally designed and built for QinetiQ who kindly donated the antenna assembly and some components to use some years ago. After several modifications and steady improvement, T-220 is one of our highest performance 94 GHz FMCW Doppler radars, with extremely low phase noise, a maximum bandwidth of 1.8 GHz, a transmit power of +18 dBm and a noise figure of 6 dB.

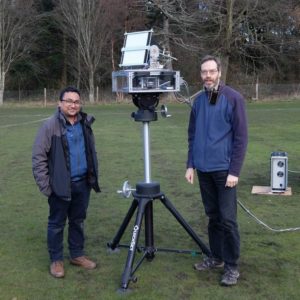
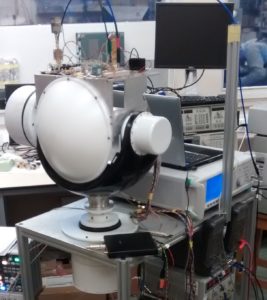
AVTIS-2 is one of two second generation All-weather Volcano Topography Imaging Sensor instruments designed for terrain mapping. Originally built by Dr Dav Macfarlane for mapping volcanic lava domes, AVTIS-2 is currently being used by Will Harcourt for his PhD research on mapping glaciers. The 94 GHz FMCW radar has a 45 cm Cassegrain antenna (which gives a narrow pencil beam) that is rastered across a scene using a two-axis gimbal and is capable of mapping terrain up to approximately 6 km.

AVTIS-3 is the sister radar to AVTIS-2 and is deployed on the Caribbean island of Montserrat to monitor the lava dome on the Soufriere Hills Volcano. It is one of a suite of sensors used to monitor the volcano by the Montserrat Volcano Observatory which provides hazard assessments to the government and people of Montserrat. AVTIS-3 also works at 94 GHz but uses as smaller 30 cm antenna and two-axis gimbal. Much of the hardware was recycled from the first generation instrument AVTIS-1.

NIRAD is a 94 GHz surveillance radar with a 360° scanning antenna beam which rotates at the unusually fast rate of 10 Hz in order to detect and track moving objects in the scene. Originally developed for a UK MoD programme, NIRAD was ungraded with real-time processing and coherent operation by PhD student Scott Cassidy and then trialled under Home Office sponsorship. The results showed that analysis of the cross-polarisation signatures could lead to the reliable detection of large non-metallic objects being carried in the scene.
CONSORTIS was a state-of-the-art demonstrator built under the EU FP7 project of the same name to address the requirement for next generation airport security screening. CONSORTIS uses 16 channels of 340 GHz transceivers, each with a 30 GHz bandwidth, plus high speed mechanical beam steering and advanced real-time processing to image the scene in 3D at real-time frame rates. The field of view was 1m3 and the voxels were 1 x 1 x 0.5 cm3 and CONSORTIS could image this 3D volume at a frame rate of 8 Hz.
Pathfinder was a 220 GHz experimental FMCW radar with 30 GHz bandwidth developed under the CONSORTIS project to de-risk some of the radar technology development and to achieve early data collection of volumetric data with ~1cm3 voxel resolution. Pathfinder may soon be reborn as a 220 GHz coherent instrumentation radar for Doppler phenomenology studies.

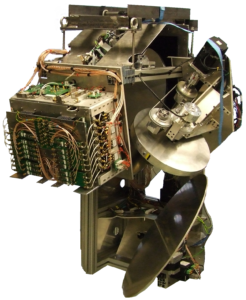
IRAD was developed under a UK MoD programme to perform long-range stand-off imaging of targets. It is a 340 GHz single pixel, heterodyne FMCW radar which uses galvanometer scanning optics to raster the scene and generate 3D volumetric data simultaneously in co- and cross-polarisations. The addition of coherent operation and real-time processing by PhD student Scott Cassidy led to IRAD being the first submillimetre wave 3D imaging radar to achieve 10 Hz frame rate. With up to 5 GHz of bandwidth and by refocussing the lens at a range of ~20 m, voxel resolution of about the size of a golf ball was achieved. The experience of developing IRAD was instrumental in guiding the development of the later CONSORTIS radar. Whilst IRAD is not currently functional we have plans to modify it into a wideband instrumentation radar.

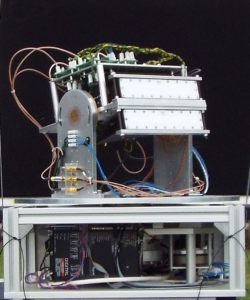
We developed a 94 GHz solid-state FMCW cloud profiling radar to demonstrate a low-cost architecture for this application. Making use of modern GaN power amplification (1 watt) and Fresnel zone plate antennas (2x 50 cm) and a simple, coherent FMCW architecture, the radar offers competitive sensitivity in comparison to the traditional but expensive high power pulsed cloud profiling radars. This radar is planned for refurbishment this summer.
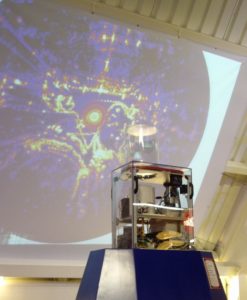
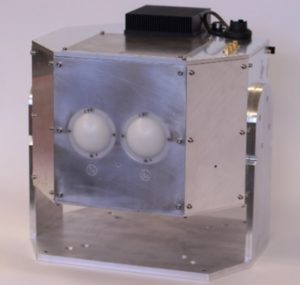
SAFIRE is a low power 94 GHz FMCW radar originally built for public education but which has also been used for research data collection. With clear plastic sides and labelled internal components, members of the public can easily see the key parts of as working radar system. The horn-lens antenna points upwards towards an angled mirror which deflects the beam horizontally and rotates continuously at up to 6 Hz. The resulting imagery is high resolution due to the narrow bema, close range and high range resolution (down to 7.5 cm) and allows people to see in near real-time what they and their surroundings look like to a W-band radar. SAFIRE has also been used to collect sea clutter data in support of a project to investigate mm-wave radar for autonomous boats.

BugEyes was the first radar the Group ever built, using separate horn-lens antennas for transmit and receive, hence the name. The first incarnation was at 94 GHz and used a triangle-wave modulated voltage controlled oscillator and frequency multiplier. The modular architecture provided valuable for the assessment of different signal sources and the collection of data with adjustable polarisation. A 38 GHz version, based on a varactor-tuned Gunn oscillator, was added in piggy-back fashion and the dual-frequency set up used to characterise the backscatter from rainfall by PhD student Peter Speirs.