Improved 3D terrain mapping using mm-wave radar
Will Harcourt, Dav macfarlane and Duncan Robertson have recently published results of an improved 3D terrain mapping algorithm which is applicable to millimetre-wave radar data.
The technique was developed for the AVTIS-2 3D mapping radar to improve the quality of extracted point clouds and digital elevation maps of terrain. The algorithm uses non-coherent averaging of range profiles from adjacent lines of sight to reduce speckle and an automated Voronoi-based point cloud outlier removal process which iteratively removes outliers in a point cloud. The method was tested using 94 GHz measurements of Balmullo Quarry in Fife, with the kind assistance of quarry operator Breedon Aggregates.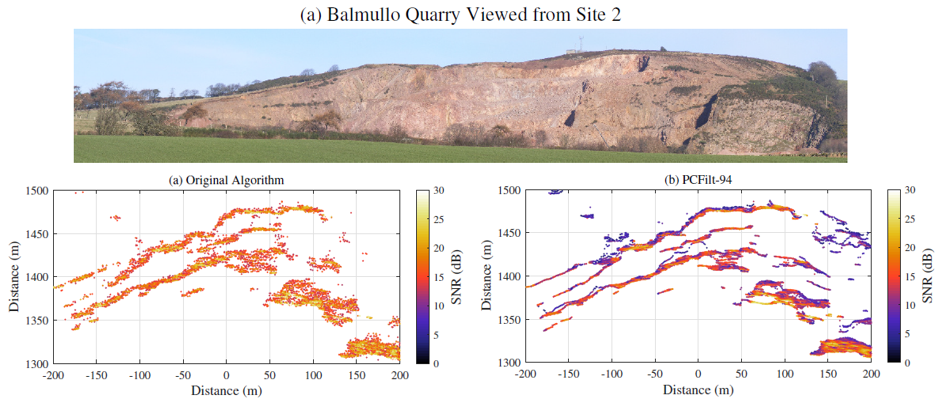
The photo shows Balmullo Quarry from one of two viewpoints used to collect radar data. The lower left image is the 3D point cloud derived from the radar data using the previous algorithm which displays speckle and outlier points. The lower right hand image is the 3D point cloud derived from the radar data using the new algorithm which shows less speckle , fewer outliers and more detail.
The accuracy of the technique was analysed and the uncertainties were found to be smaller than those reported for other close-range radar systems used for terrain mapping. The results of this study should be used as a benchmark for future application of millimetre-wave radar systems for 3D terrain mapping. The paper can be found here.